
I am a Postdoc researcher at MIT CSAIL, working with Prof. Pulkit Agrawal and Prof. Edward Adelson. I earned my PhD degree from Shanghai Jiao Tong University, where I worked with Prof. Cewu Lu. My research focuses on General Robotic Manipulation.
Previously, I have spent time at Tencent YouTu Lab and the center for VCLA, UCLA, where I worked with Prof.Yu-Wing Tai and Prof.Song-Chun Zhu.
News
- 2024-10: Our Eyesight Hand paper has been selected as a Best RoboCup Paper Finalist at IROS 2024!
- 2024-09: One paper accepted to RA-L.
- 2024-06: Two papers accepted to IROS.
- 2024-05: Our RT-X paper won the Best Paper Award at ICRA 2024!
- 2024-01: Four papers accepted to ICRA.
- 2023-10: AnyGrasp won the Best Paper Award in IROS 2023 workshop “Learning Meets Model-based Methods for Manipulation and Grasping”!
- 2023-07: GraspNet-1Billion accepted to IJRR.
- 2023-06: One paper accepted to IROS.
- 2023-05: AnyGrasp accepted to T-RO.
- 2022-11: AlphaPose accpeted to T-PAMI.
- 2022-03: One paper accepted to Nature.
- 2021-06: Awarded the ByteDance Fellowship. Thanks ByteDance!
- 2020-11: Awarded the Microsoft Research Asia Fellowship. Thanks Microsoft!
- 2019-12: Awarded the Baidu Fellowship. Thanks Baidu!
Selected Publications
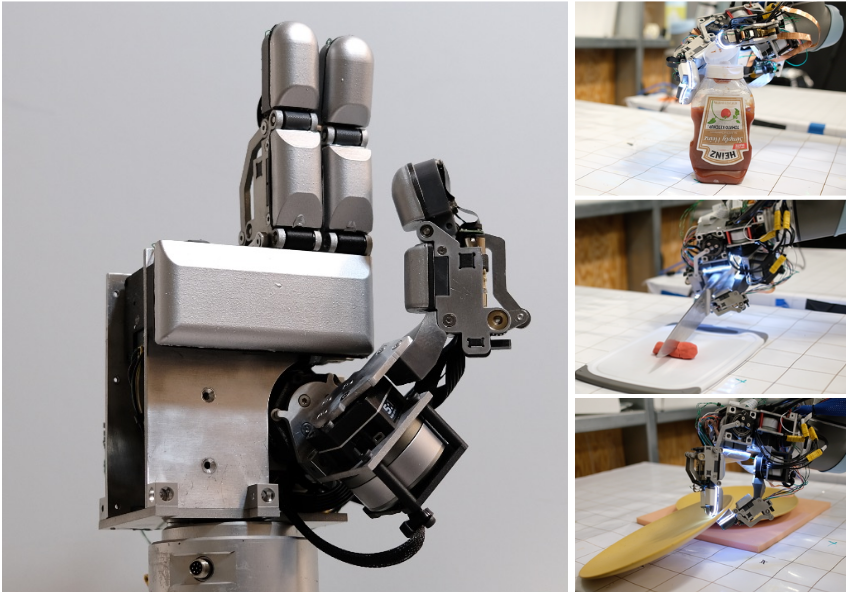
EyeSight Hand: Design of a Fully-Actuated Dexterous Robot Hand with Integrated Vision-Based Tactile Sensors and Compliant Actuation
Branden Romero*, Hao-Shu Fang*, Pulkit Agrawal, Edward AdelsonIROS 2024 (Best RoboCup Paper Finalist) [paper]

For the full publication list please refer to my Google Scholar page.
Projects
GraspNet
General object grasping for any scenario

AlphaPose
Accurate multi-pereson pose estimation
Public Services
Co-chair for the IROS 2024 Best RoboCup Award session.
Organizer for the ICML 2024 MFM-EAI Workshop.
Reviewer for IJRR, T-RO, T-PAMI, IJCV, TMM, TOC, TIP, ICRA, IROS, ICLR, CVPR, ICCV, ECCV, AAAI, etc.